分散型インフラの発展により、ネットワーク帯域幅は、共有可能かつインセンティブ化されたデジタルリソースとして急速に注目されています。従来のネットワークアクセスサービスは、帯域幅の提供を中央集権型のプロキシノードに依存してきましたが、このモデルではリソースの集中、コスト増加、透明性の不足といった課題が生じやすい状況です。
分散型ネットワークリソースへの需要拡大を受け、帯域幅共有プロトコルは、遊休リソース提供者とネットワーク利用者をインセンティブメカニズムで結び付け、個人が自身のネットワークリソースを分散型サービスへ貢献できる環境を実現しています。GrassおよびNodepayは、この分野を代表する主要プロトコルです。
GrassとNodepayの比較:概要と主な違い
Grassは分散型の帯域幅共有プロトコルであり、ユーザーはノードを運用して遊休ネットワークリソースを共有し、分散型ネットワークアクセスに帯域幅を提供、貢献度に応じてクレジットを獲得します。主な目的は、ユーザーノードによる分散型ネットワークアクセス層を構築し、中央集権型プロキシサービスに依存せず、グローバルにパブリックネットワークリクエストを実行可能とすることです。
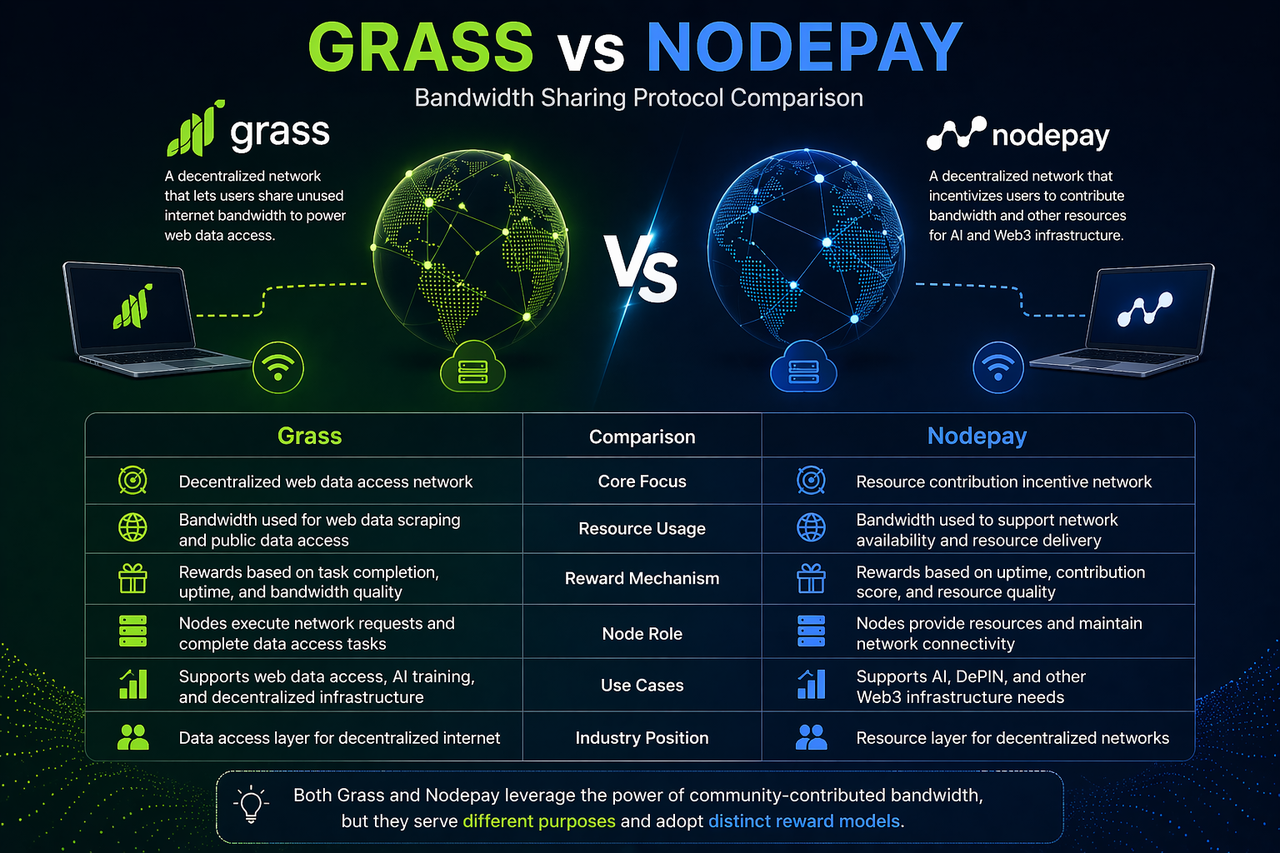
Nodepayも分散型のリソース共有プロトコルで、ユーザーはノード運用によるネットワークリソースの提供を行い、ノードのステータスや貢献度に応じて報酬を受け取ります。Grassと同様に、Nodepayもユーザーの遊休ネットワークリソースを活用しますが、特定のネットワークアクセス業務の実行には重点を置いていません。代わりに、リソース貢献を直接報酬に結び付ける点を重視しています。
このため、Nodepayの中核的な価値はリソース貢献ネットワークの構築にあります。ノードのオンラインステータス、安定性、リソース可用性に基づいてインセンティブを付与し、継続的な貢献がプロトコルの主な価値創出要因となっています。
| 比較項目 | Grass | Nodepay |
|---|---|---|
| コアポジショニング | 分散型データアクセスネットワーク | 分散型リソース貢献ネットワーク |
| リソース用途 | パブリックアクセス・データリクエスト | ノードリソース貢献 |
| 報酬ロジック | タスクベースの報酬 | ノード貢献ベースの報酬 |
| ノードの役割 | ネットワークタスクの実行 | オンラインリソースのステータス提供 |
| ネットワーク目標 | 分散型アクセス機能 | リソースインセンティブシステム |
| アプリケーションの焦点 | データスクレイピング・ネットワークアクセス | リソース供給・貢献インセンティブ |
GrassとNodepayのプロトコル目標の違いは?
GrassとNodepayはいずれもユーザーの遊休ネットワークリソースを活用していますが、プロトコルの目的は明確に異なります。Grassは分散型データアクセスネットワークの構築を目指し、ネットワークリソースをパブリックデータアクセスやネットワークトラフィック分散など、実際のタスク実行にどう活用するかに焦点を当てています。つまり、Grassはネットワークタスク実行のための帯域幅インフラとして機能します。
一方、Nodepayはリソース貢献そのものを重視し、ユーザーが継続的にリソースを供給することを主目的としています。これにより、拡張性のあるリソースネットワークの構築を実現します。Nodepayはリソース供給のためのノードインセンティブプロトコルといえます。
要するに、Grassはリソース活用の効率性を重視し、Nodepayはリソース供給のインセンティブ化に注力しています。
GrassとNodepayのリソース活用方法の違いは?
Grassは共有帯域幅を用いてパブリックネットワークアクセス業務を実行します。データアクセスリクエストが発生すると、プロトコルがタスクをノードに割り当て、ノードが実際のデータアクセスを担当します。そのため、Grassノードの貢献は特定タスクに直接連動しています。
一方、Nodepayはノードの貢献度を記録することに重点を置いています。ノードリソースはプロトコル全体のリソース供給を支える役割を担い、特定のデータアクセス業務に必ずしも直結していません。プロトコルはノードのオンラインステータスやリソース可用性に基づいて報酬を付与します。
まとめると、Grassはタスク駆動型、Nodepayは貢献駆動型の構造です。
GrassとNodepayの報酬体系の違いは?
Grassはノードが実際に完了したタスク数に基づいて報酬を付与します。ノードの稼働時間が長く、帯域幅品質が高く、ネットワークタスクの完了数が多いほど、より多くのクレジットが得られます。この仕組みにより、ノードの収益はネットワークへの貢献度に直結し、タスク実行効率が重視されます。
Nodepayの報酬はリソース貢献度、主にノードの稼働時間、リソースの安定性、貢献レベルに基づき、タスク完了量は重視されません。Nodepayは実行効率よりも持続的なリソース供給に重点を置いています。
Grassはタスクベースの報酬メカニズム、Nodepayはリソース参加型の報酬システムを採用しています。
GrassとNodepayのネットワーク構造の違いは?
Grassのネットワーク構造はタスク分配を中心に設計されています。ネットワークリクエストを受信すると、適格なノードにタスクが割り当てられ、Grassノードはタスク指向で動作します。この設計により、Grassは分散型ネットワークアクセス層として機能します。
Nodepayの構造はリソースノード管理に重点を置いています。ノードはオンラインステータスやリソース可用性を維持し、パフォーマンスに応じて報酬を獲得しますが、複雑なタスクスケジューリングはありません。Nodepayはリソースインセンティブネットワークとして運用されます。
要するに、Grassノードは実行指向、Nodepayノードは貢献指向です。
GrassとNodepayの適用シナリオの違いは?
設計目標の違いにより、GrassとNodepayは異なるユースケースに適しています。Grassは大規模な分散型ネットワークアクセス、例えばパブリックデータスクレイピング、ネットワークリクエスト分配、分散型データアクセスサービスなど、ノードがネットワークリクエストを処理する用途に最適です。
Nodepayはリソース貢献のインセンティブ化や持続可能なリソース供給ネットワークの構築など、ネットワークの安定性や拡張性を重視するシナリオに適しています。
Grassは機能的な帯域幅ネットワーク、Nodepayはリソース指向のノードネットワークです。
まとめ
GrassとNodepayは、ユーザーが遊休ネットワークリソースを提供することで報酬を獲得できる帯域幅共有プロトコルですが、設計目標は根本的に異なります。Grassは帯域幅を実際のネットワークタスクへ応用し、タスク分配を通じて分散型データアクセスネットワークを構築することを重視します。Nodepayはリソース貢献自体に焦点を当て、ノードの稼働時間やリソース品質に基づくインセンティブシステムを構築します。
これらの違いは、帯域幅共有プロトコル開発における2つの主要な方向性を示しています。1つはタスク実行を中心にネットワークインフラを築く方向、もう1つはリソース貢献を中心にインセンティブネットワークを構築する方向です。この違いを理解することが、分散型帯域幅プロトコルの設計論理を把握する上で重要です。
よくある質問
GrassとNodepayの主な違いは?
Grassは共有帯域幅を活用してネットワークタスクを実行することに重点を置き、Nodepayはノードリソースの貢献を基盤に報酬メカニズムを構築しています。リソース活用やインセンティブのアプローチが根本的に異なります。
Grassの報酬メカニズムはNodepayと同じですか?
どちらもノードの貢献に報酬を与えますが、Grassはタスク完了量を重視し、Nodepayはノードの稼働時間やリソース貢献度を優先しています。
Grassが最適なシナリオは?
Grassは分散型ネットワークアクセスが必要なシナリオ、例えばパブリックデータアクセス、ネットワークリクエスト分配、分散型データアクセス基盤などに最適です。
Nodepayのコア目標は?
Nodepayのコア目標は、リソース貢献インセンティブネットワークを構築し、ノードリソースの供給と報酬を通じて持続可能なリソースネットワークを形成することです。
GrassとNodepayが比較される理由は?
両者とも帯域幅共有およびノードインセンティブモデルを採用していますが、リソース活用やプロトコル目標が異なるため、比較・分析の対象となっています。
共有
内容


関連記事

ONDOトークン経済モデル:プラットフォームの成長とユーザーエンゲージメントをどのように推進するのか
AI分野におけるRenderの申請理由:分散型ハッシュレートが人工知能の発展を支える仕組み
Render、io.net、Akash:DePINハッシュレートネットワークの比較分析
Plasma(XPL)トークノミクス分析:供給、分配、価値捕捉
Plasma(XPL)と従来型決済システムの比較:ステーブルコインを活用した国際決済および流動性フレームワークの新たな定義